Creating a Basic Remote Video Monitor with ESP32-WROVER and ESP32-CAM
In this tutorial we will show how to create a basic remote video monitor using 2 ESP32-based boards communicating via Wi-Fi:
- The ESP32-CAM module will be used to capture pictures
- The ESP32-WROVER module will be used to display the captured images
The modules will communicate to each other using Wi-Fi (the WROVER module will act as a Wi-Fi access point and the ESP32-CAM module will connect to it). The diagram below provides an overview of the communication between the modules: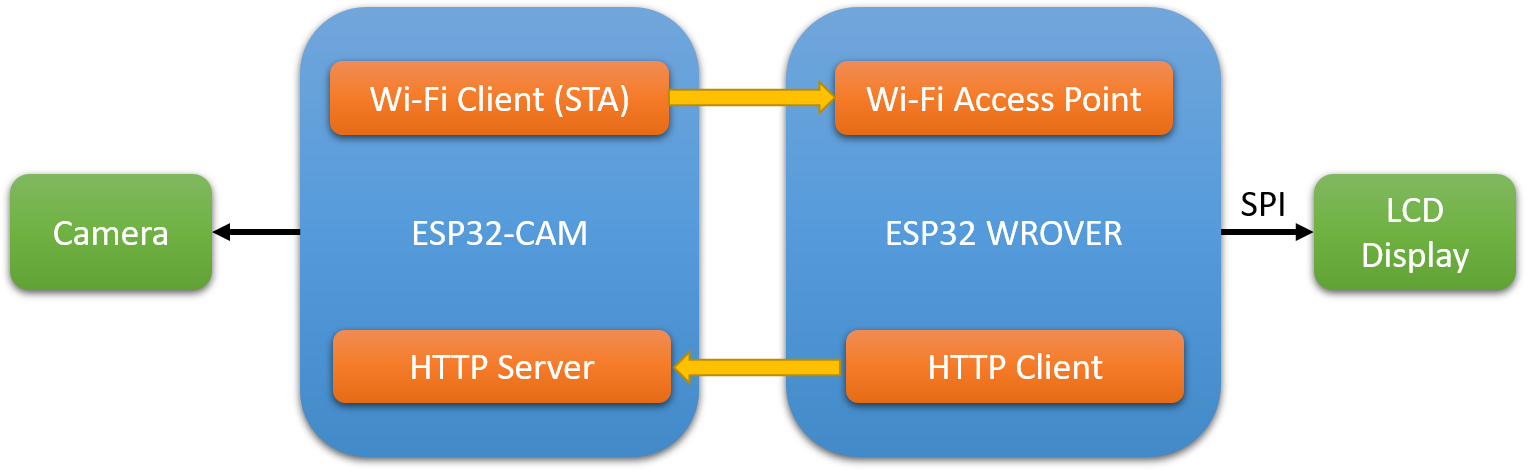 Before you begin, install Visual Studio and VisualGDB 5.4 or later and ensure that you can program both modules by following our ESP32-WROVER LCD tutorial and the ESP32-CAM tutorial.
Before you begin, install Visual Studio and VisualGDB 5.4 or later and ensure that you can program both modules by following our ESP32-WROVER LCD tutorial and the ESP32-CAM tutorial.
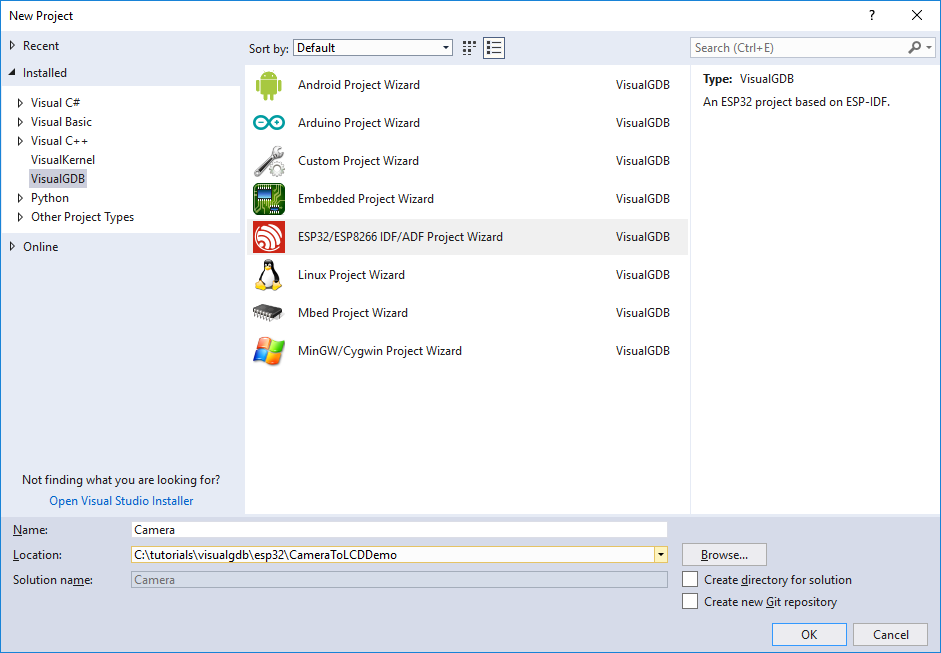
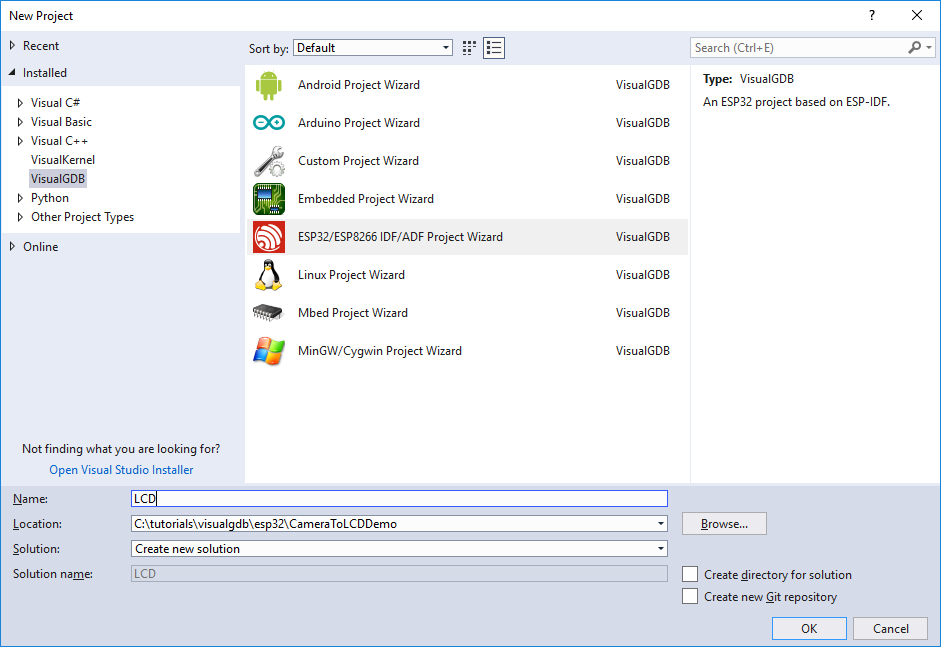
- We will begin with creating the firmware for the camera module. Start Visual Studio and open the VisualGDB ESP32 project wizard:
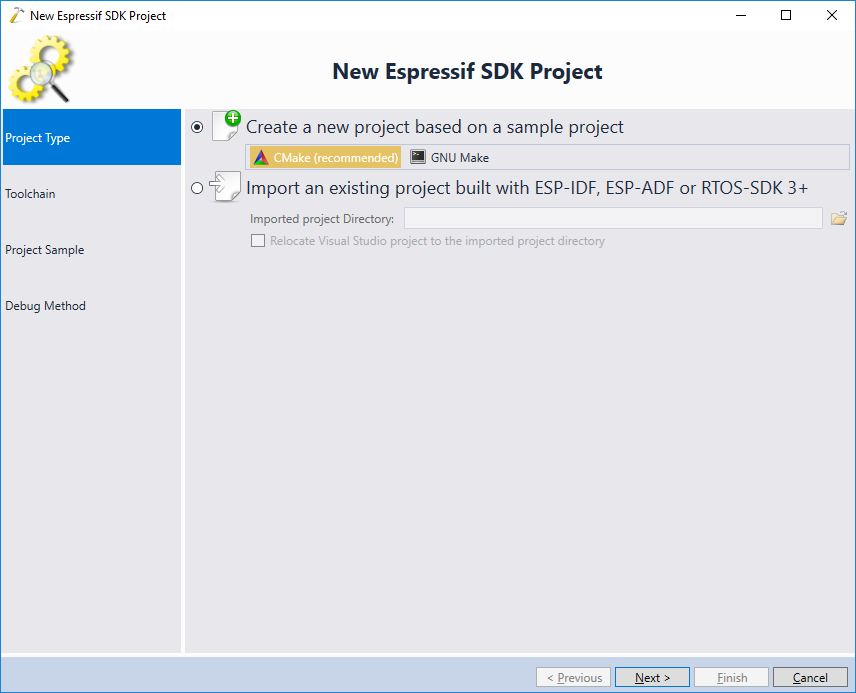
- On the first page of the wizard select the CMake build subsystem:

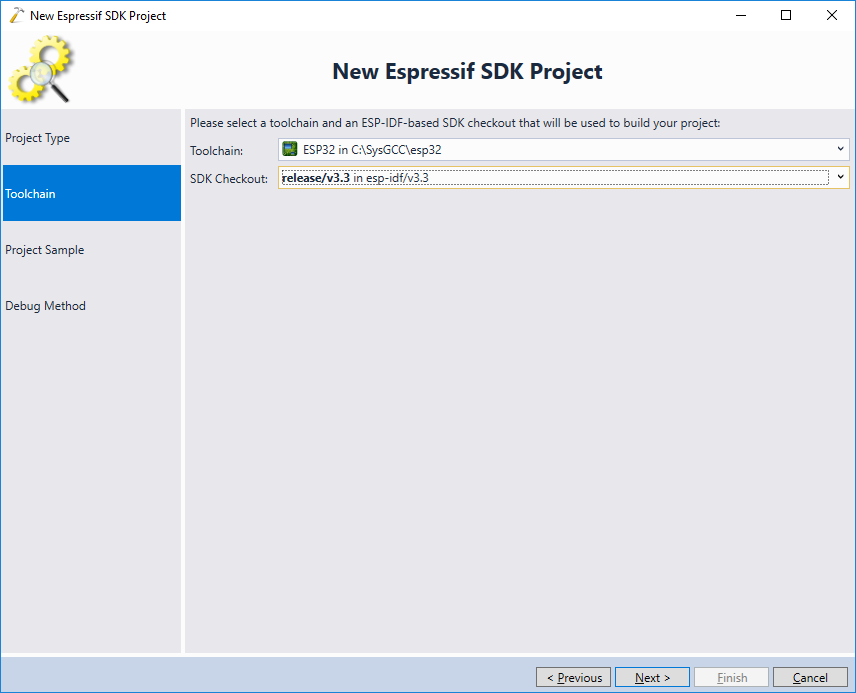
- Next, select the latest ESP32 toolchain and the latest ESP-IDF checkout:
 Update: For better compatibility with the latest ESP32 tools, we recommend selecting the consolidated toolchain instead.
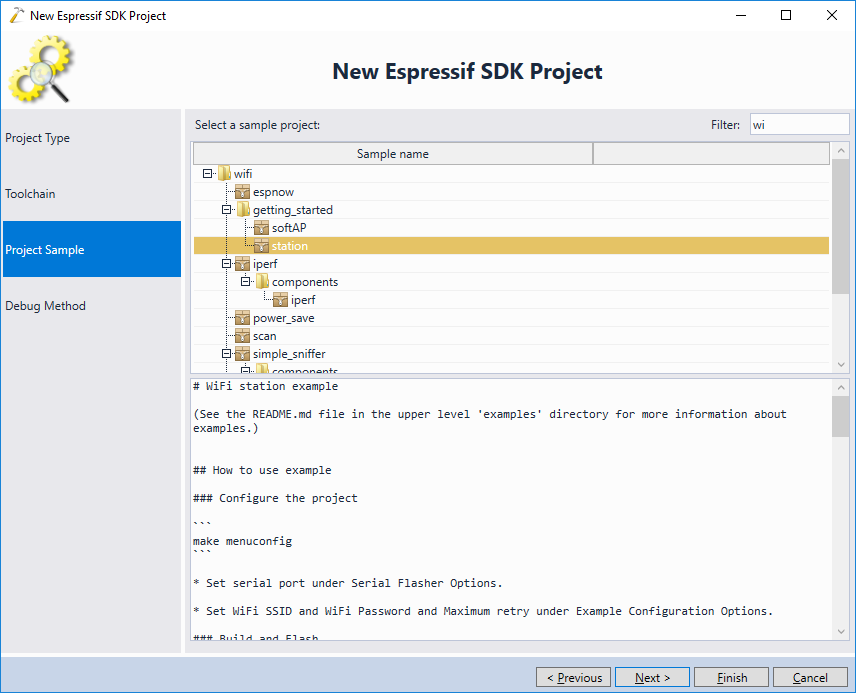
Update: For better compatibility with the latest ESP32 tools, we recommend selecting the consolidated toolchain instead. - We will create the camera firmware by cloning the Wi-Fi station example and modifying it to serve pictures taken from the camera via HTTP. Hence, pick the wifi/getting_started/station sample:
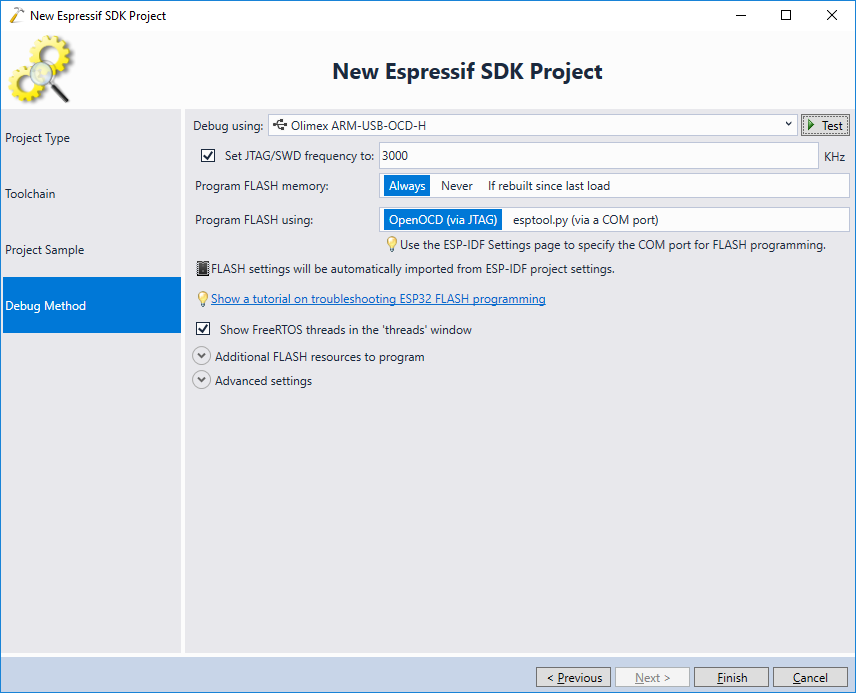
- On the Debug Settings page select the settings necessary to debug the ESP32-CAM module. If you are not sure, follow the ESP32-CAM tutorial to get JTAG to work:
- Press “Finish” to generate the project. Once the project is loaded, right-click on the components view in Solution Explorer and select Add->New Item:

- Add an empty component called “esp32-camera” to the project:

- Now we will replace our dummy component with a copy of the actual ESP32 camera library. Open the Command Prompt window and go to the project directory. Then run the following commands in the terminal:
rmdir /s /q components\esp32-camera git clone https://github.com/espressif/esp32-camera components/esp32-camera
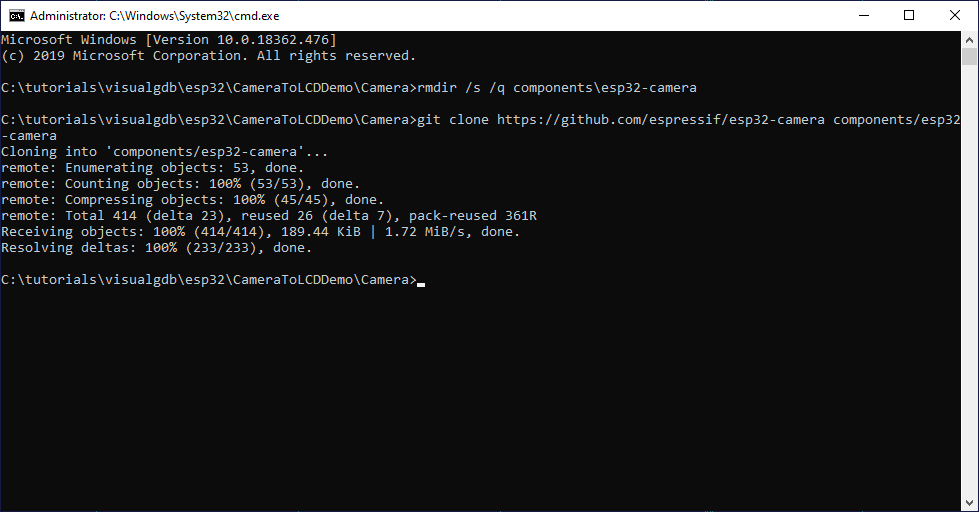 If the git command doesn’t work make sure you have git installed and referenced in the PATH variable.
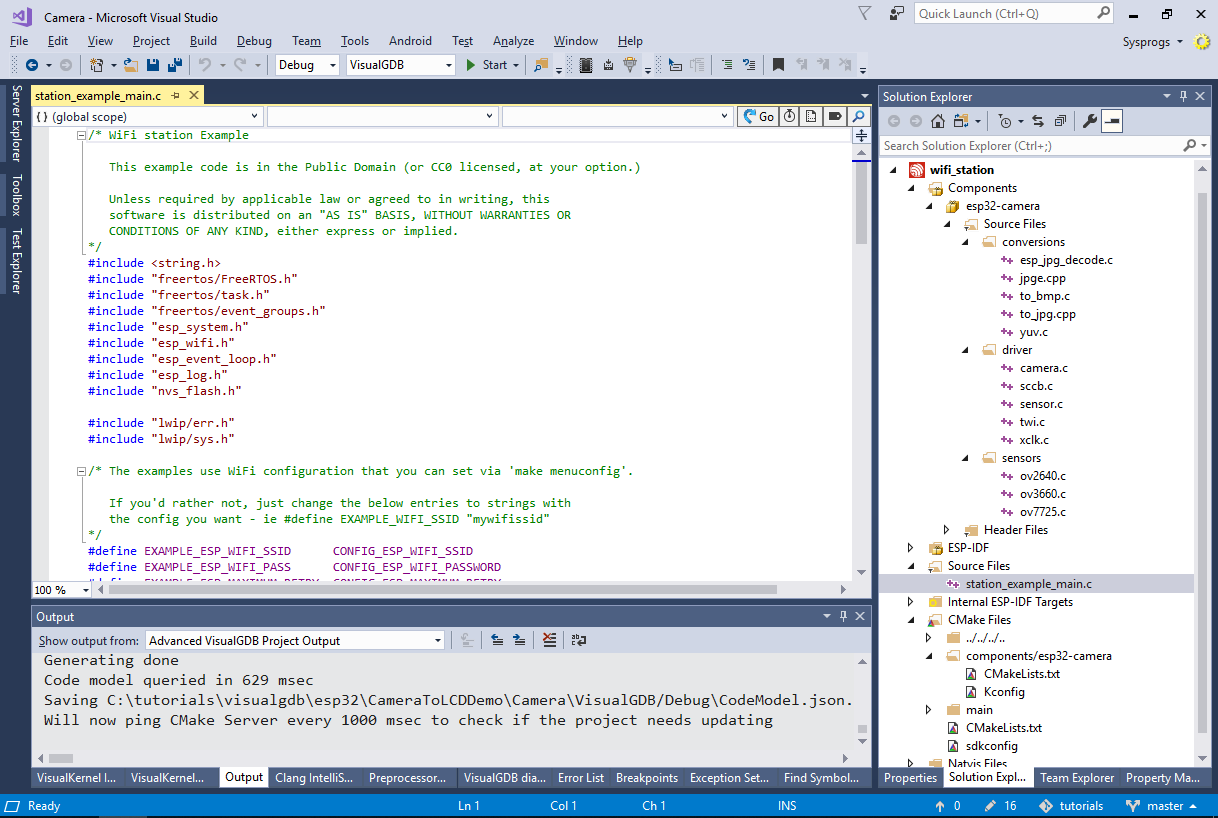
If the git command doesn’t work make sure you have git installed and referenced in the PATH variable. - Once the camera library is cloned, go back to Visual Studio and reload the project:

- Once the project is reloaded, VisualGDB will automatically display the contents of the esp32-camera library in Solution Explorer:
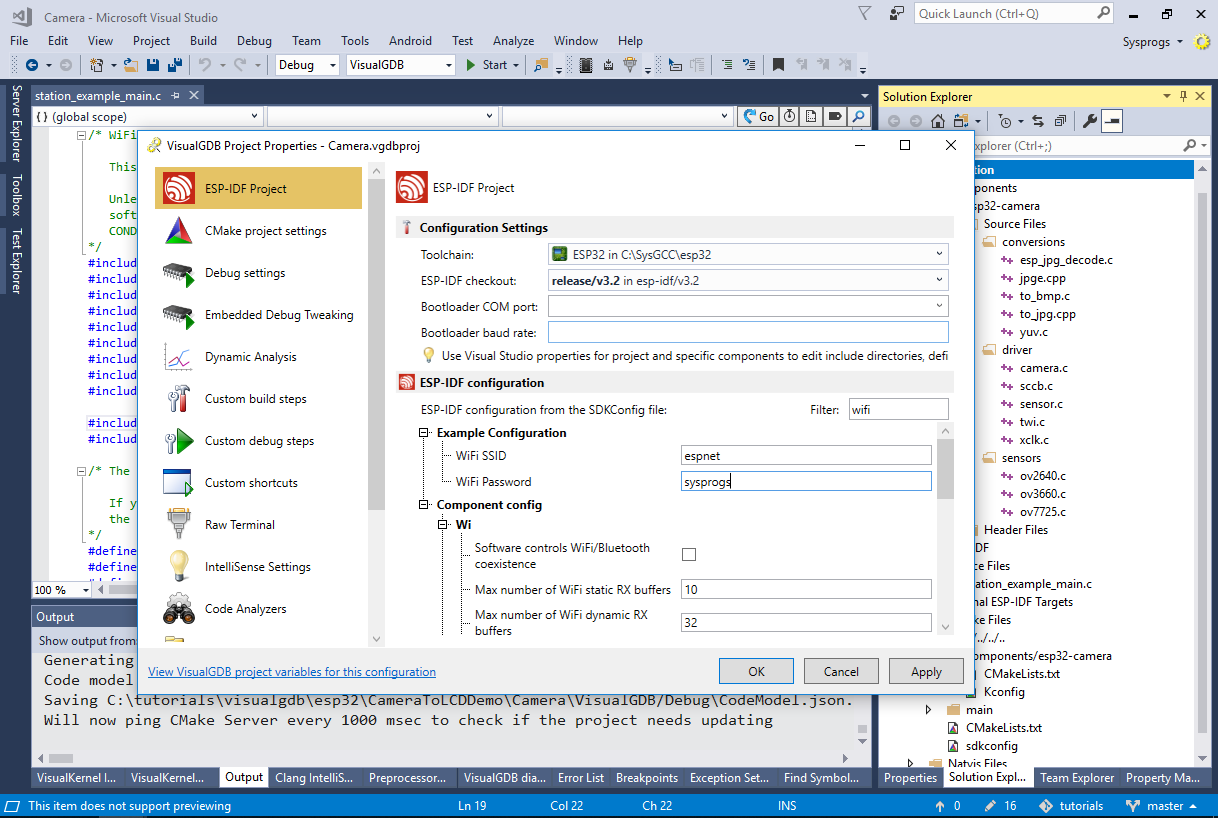
- Before we proceed with using the camera library, open VisualGDB Project Properties and set the Wi-Fi SSID and password to match your Wi-Fi network:
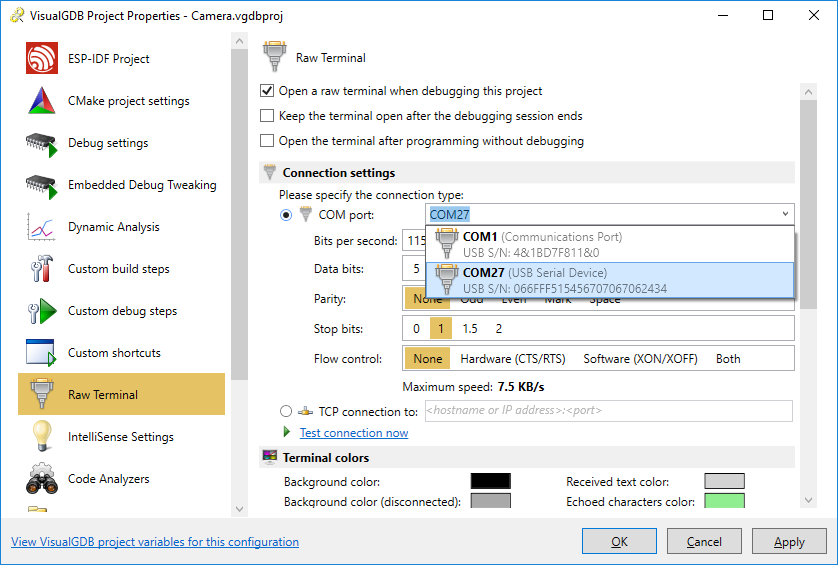
- If you are using the Custom edition of VisualGDB, we recommend enabling the raw terminal on the COM port connected to the ESP32-CAM board. For lower editions, simply use an external terminal program instead:
- Now we will add the code that will take pictures using the camera. First of all, copy the camera I/O pin definitions from the Arduino sample:
#define CAMERA_MODEL_AI_THINKER #if defined(CAMERA_MODEL_WROVER_KIT) #define PWDN_GPIO_NUM -1 #define RESET_GPIO_NUM -1 #define XCLK_GPIO_NUM 21 #define SIOD_GPIO_NUM 26 #define SIOC_GPIO_NUM 27 #define Y9_GPIO_NUM 35 #define Y8_GPIO_NUM 34 #define Y7_GPIO_NUM 39 #define Y6_GPIO_NUM 36 #define Y5_GPIO_NUM 19 #define Y4_GPIO_NUM 18 #define Y3_GPIO_NUM 5 #define Y2_GPIO_NUM 4 #define VSYNC_GPIO_NUM 25 #define HREF_GPIO_NUM 23 #define PCLK_GPIO_NUM 22 #elif defined(CAMERA_MODEL_M5STACK_PSRAM) #define PWDN_GPIO_NUM -1 #define RESET_GPIO_NUM 15 #define XCLK_GPIO_NUM 27 #define SIOD_GPIO_NUM 25 #define SIOC_GPIO_NUM 23 #define Y9_GPIO_NUM 19 #define Y8_GPIO_NUM 36 #define Y7_GPIO_NUM 18 #define Y6_GPIO_NUM 39 #define Y5_GPIO_NUM 5 #define Y4_GPIO_NUM 34 #define Y3_GPIO_NUM 35 #define Y2_GPIO_NUM 32 #define VSYNC_GPIO_NUM 22 #define HREF_GPIO_NUM 26 #define PCLK_GPIO_NUM 21 #elif defined(CAMERA_MODEL_AI_THINKER) #define PWDN_GPIO_NUM 32 #define RESET_GPIO_NUM -1 #define XCLK_GPIO_NUM 0 #define SIOD_GPIO_NUM 26 #define SIOC_GPIO_NUM 27 #define Y9_GPIO_NUM 35 #define Y8_GPIO_NUM 34 #define Y7_GPIO_NUM 39 #define Y6_GPIO_NUM 36 #define Y5_GPIO_NUM 21 #define Y4_GPIO_NUM 19 #define Y3_GPIO_NUM 18 #define Y2_GPIO_NUM 5 #define VSYNC_GPIO_NUM 25 #define HREF_GPIO_NUM 23 #define PCLK_GPIO_NUM 22 #else #error "Camera model not selected" #endif
Then add a basic HTTP request handler that will take a picture and send it via HTTP each time it receives a request:
#include <esp_camera.h> #include <esp_http_server.h> httpd_handle_t s_httpd = NULL; esp_err_t jpg_httpd_handler(httpd_req_t *req) { camera_fb_t *fb = NULL; esp_err_t res = ESP_OK; size_t fb_len = 0; int64_t fr_start = esp_timer_get_time(); fb = esp_camera_fb_get(); if (!fb) { ESP_LOGE(TAG, "Camera capture failed"); httpd_resp_send_500(req); return ESP_FAIL; } res = httpd_resp_set_type(req, "image/jpeg"); if (res == ESP_OK) { fb_len = fb->len; res = httpd_resp_send(req, (const char *)fb->buf, fb->len); } esp_camera_fb_return(fb); int64_t fr_end = esp_timer_get_time(); ESP_LOGI(TAG, "JPG: %uKB %ums", (uint32_t)(fb_len / 1024), (uint32_t)((fr_end - fr_start) / 1000)); return res; }
Finally, replace the app_main() function with a version that enables the camera driver and starts an HTTP server:
void app_main() { //Initialize NVS esp_err_t ret = nvs_flash_init(); if (ret == ESP_ERR_NVS_NO_FREE_PAGES || ret == ESP_ERR_NVS_NEW_VERSION_FOUND) { ESP_ERROR_CHECK(nvs_flash_erase()); ret = nvs_flash_init(); } ESP_ERROR_CHECK(ret); ESP_LOGI(TAG, "ESP_WIFI_MODE_STA"); wifi_init_sta(); camera_config_t config; config.ledc_channel = LEDC_CHANNEL_0; config.ledc_timer = LEDC_TIMER_0; config.pin_d0 = Y2_GPIO_NUM; config.pin_d1 = Y3_GPIO_NUM; config.pin_d2 = Y4_GPIO_NUM; config.pin_d3 = Y5_GPIO_NUM; config.pin_d4 = Y6_GPIO_NUM; config.pin_d5 = Y7_GPIO_NUM; config.pin_d6 = Y8_GPIO_NUM; config.pin_d7 = Y9_GPIO_NUM; config.pin_xclk = XCLK_GPIO_NUM; config.pin_pclk = PCLK_GPIO_NUM; config.pin_vsync = VSYNC_GPIO_NUM; config.pin_href = HREF_GPIO_NUM; config.pin_sscb_sda = SIOD_GPIO_NUM; config.pin_sscb_scl = SIOC_GPIO_NUM; config.pin_pwdn = PWDN_GPIO_NUM; config.pin_reset = RESET_GPIO_NUM; config.xclk_freq_hz = 20000000; config.pixel_format = PIXFORMAT_JPEG; config.frame_size = FRAMESIZE_QVGA; config.jpeg_quality = 10; config.fb_count = 1; // camera init esp_err_t err = esp_camera_init(&config); ESP_ERROR_CHECK(err); sensor_t *s = esp_camera_sensor_get(); s->set_framesize(s, FRAMESIZE_QVGA); s->set_quality(s, 20); httpd_config_t httpdConfig = HTTPD_DEFAULT_CONFIG(); httpd_uri_t index_uri = { .uri = "/", .method = HTTP_GET, .handler = jpg_httpd_handler, .user_ctx = NULL}; if (httpd_start(&s_httpd, &httpdConfig) == ESP_OK) { httpd_register_uri_handler(s_httpd, &index_uri); } }
- Press F5 to build and start your program. Take a note of the IP address reported by the board via the COM port:

- Open the IP address of the board in your browser. You will see a low-resolution picture from the camera:
- Now it’s the time to create the firmware for the ESP32-WROVER board that will request the pictures from the camera and display them on the on-board LCD screen. Open another instance of Visual Studio and start the VisualGDB ESP32 project wizard:
- Proceed with the CMake build subsystem:
- This time ensure you are using ESP-IDF 3.3 or later, as the older versions do not report the IP addresses assigned to the Wi-Fi clients:
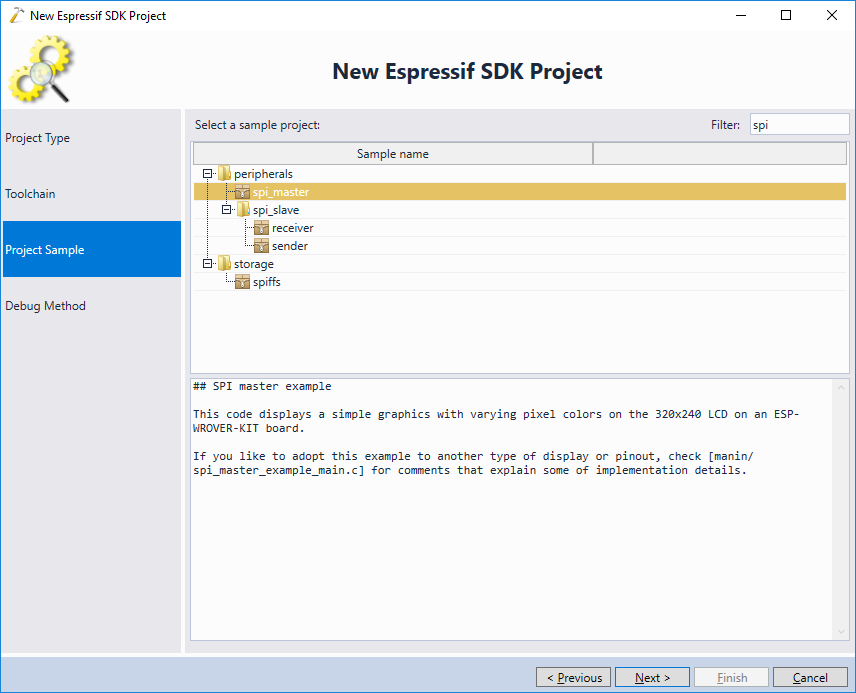
- Select the spi_master sample and press “next”:
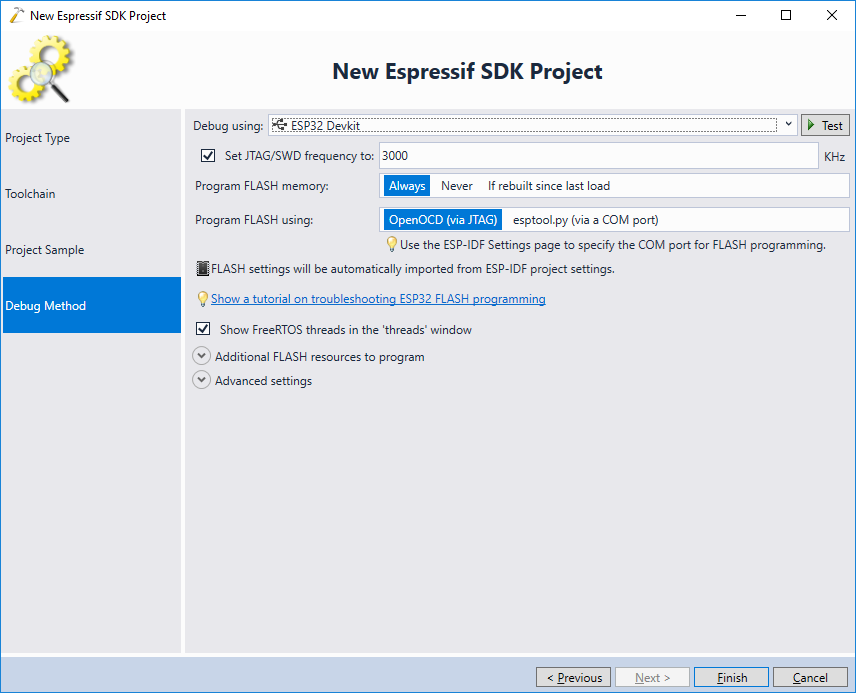
- Select the debug settings for the ESP32-WROVER board. Do not confuse them with the settings for the ESP32-CAM module:
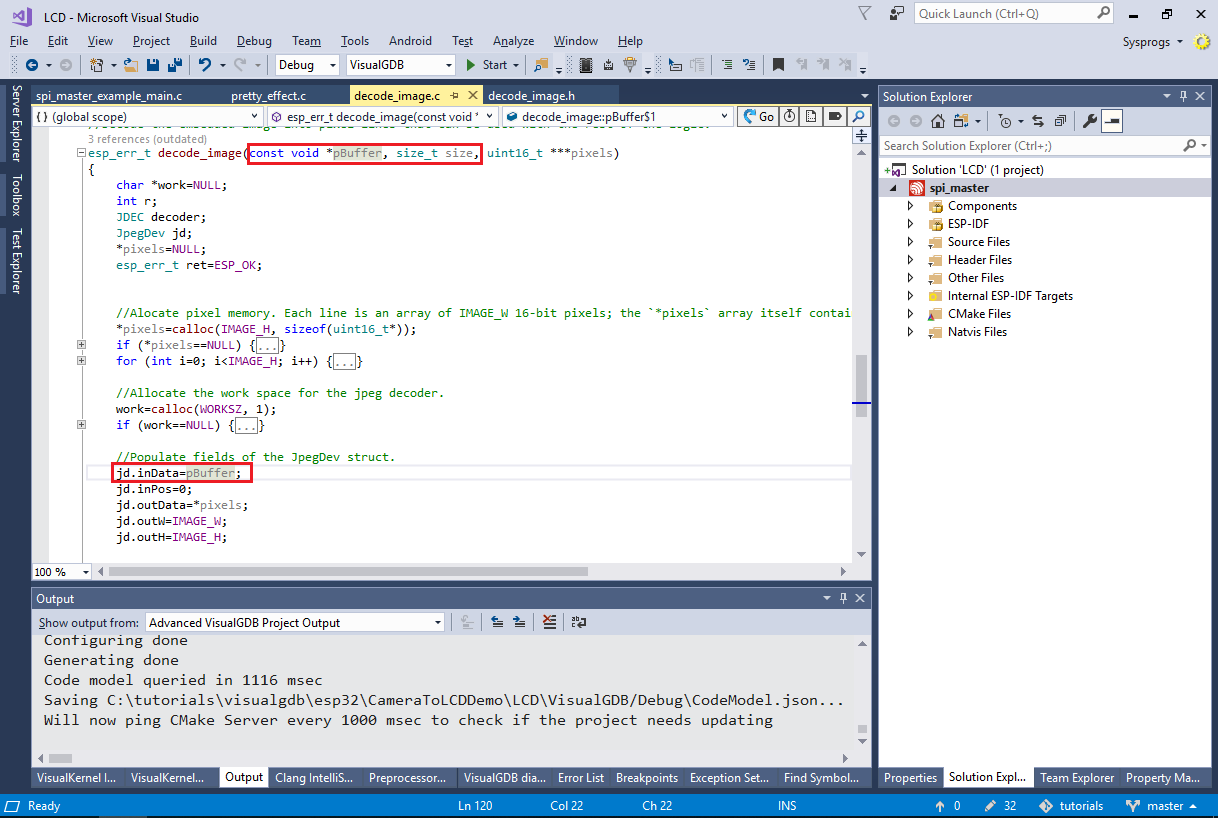
- Now we will modify the LCD display example to show the pictures received via Wi-Fi instead of the hardcoded JPEG image. First of all, modify the decode_image() function to accept an arbitrary JPEG buffer instead of the one in the FLASH memory:
 See the ESP32-WROVER LCD tutorial for more details about the roles of various LCD-related functions.
See the ESP32-WROVER LCD tutorial for more details about the roles of various LCD-related functions. - Now we will proceed creating a Wi-Fi access point. Add the following code to the main source file:
#include "freertos/FreeRTOS.h" #include "freertos/task.h" #include "freertos/event_groups.h" #include "esp_system.h" #include "esp_wifi.h" #include "esp_event_loop.h" #include "esp_log.h" #include "nvs_flash.h" #include "esp_http_client.h" ip4_addr_t s_ClientIP; static EventGroupHandle_t s_wifi_event_group; const int WIFI_CONNECTED_BIT = BIT0; static esp_err_t event_handler(void *ctx, system_event_t *event) { switch (event->event_id) { case SYSTEM_EVENT_AP_STAIPASSIGNED: s_ClientIP = event->event_info.ap_staipassigned.ip; xEventGroupSetBits(s_wifi_event_group, WIFI_CONNECTED_BIT); break; default: break; } return ESP_OK; } #define WIFI_SSID "espnet" #define WIFI_PASSWORD "sysprogs" void wifi_init_softap() { s_wifi_event_group = xEventGroupCreate(); esp_err_t ret = nvs_flash_init(); if (ret == ESP_ERR_NVS_NO_FREE_PAGES || ret == ESP_ERR_NVS_NEW_VERSION_FOUND) { ESP_ERROR_CHECK(nvs_flash_erase()); ret = nvs_flash_init(); } ESP_ERROR_CHECK(ret); tcpip_adapter_init(); ESP_ERROR_CHECK(esp_event_loop_init(event_handler, NULL)); wifi_init_config_t cfg = WIFI_INIT_CONFIG_DEFAULT(); ESP_ERROR_CHECK(esp_wifi_init(&cfg)); wifi_config_t wifi_config = { .ap = { .ssid = WIFI_SSID, .ssid_len = strlen(WIFI_SSID), .password = WIFI_PASSWORD, .max_connection = 4, .authmode = WIFI_AUTH_WPA2_PSK}, }; ESP_ERROR_CHECK(esp_wifi_set_mode(WIFI_MODE_AP)); ESP_ERROR_CHECK(esp_wifi_set_config(ESP_IF_WIFI_AP, &wifi_config)); ESP_ERROR_CHECK(esp_wifi_start()); }
Ensure that the Wi-Fi SSID and password on the WROVER board match the SSID and password in the ESP32-CAM firmware and do not conflict with your normal Wi-Fi network.
Note how the handler for the SYSTEM_EVENT_AP_STAIPASSIGNED event (raised by ESP-IDF when a client connected to our access point gets assigned an IP address) saves the address assigned to the last client into the s_ClientIP variable.
- Add the following function that will continuously download the JPEG images from the last connected client and will display them on the LCD screen:
#include "decode_image.h" void GetImagesFromClient(spi_device_handle_t spi) { const int kMaxJpegFileSize = 32768; char *pBuf = (char *)malloc(kMaxJpegFileSize); uint16_t *pDMABuf = heap_caps_malloc(320 * PARALLEL_LINES * sizeof(uint16_t), MALLOC_CAP_DMA); for (;;) { char url[128]; sprintf(url, "http://%d.%d.%d.%d/", (s_ClientIP.addr >> 0) & 0xFF, (s_ClientIP.addr >> 8) & 0xFF, (s_ClientIP.addr >> 16) & 0xFF, (s_ClientIP.addr >> 24) & 0xFF); esp_http_client_config_t config = { .url = url, }; esp_http_client_handle_t client = esp_http_client_init(&config); esp_http_client_open(client, 0); int content_length = esp_http_client_fetch_headers(client); int total_read_len = 0, read_len = 0; if (total_read_len < content_length && content_length <= kMaxJpegFileSize) read_len = esp_http_client_read(client, pBuf, content_length); esp_http_client_close(client); esp_http_client_cleanup(client); if (read_len) { uint16_t **decoded = NULL; esp_err_t rc = decode_image(pBuf, read_len, &decoded); if (!rc) { for (int y = 0; y < 240; y += PARALLEL_LINES) { for (int yo = 0; yo < PARALLEL_LINES; yo++) memcpy(pDMABuf + yo * 320, decoded[y + yo], 320 * sizeof(uint16_t)); send_lines(spi, y, pDMABuf); send_line_finish(spi); } } if (decoded != NULL) { for (int i = 0; i < 256; i++) { free((decoded)[i]); } free(decoded); } } } }
- Finally, remove the call to the pretty_effect_init() function (and the function itself) and replace the end of app_init() with the following code:
wifi_init_softap(); xEventGroupWaitBits(s_wifi_event_group, WIFI_CONNECTED_BIT, pdFALSE, pdFALSE, portMAX_DELAY); GetImagesFromClient(spi);

- Now you can build and run the WROVER firmware. Once it starts up, power up the ESP32-CAM board and check the WROVER output for messages regarding the Wi-Fi clients:
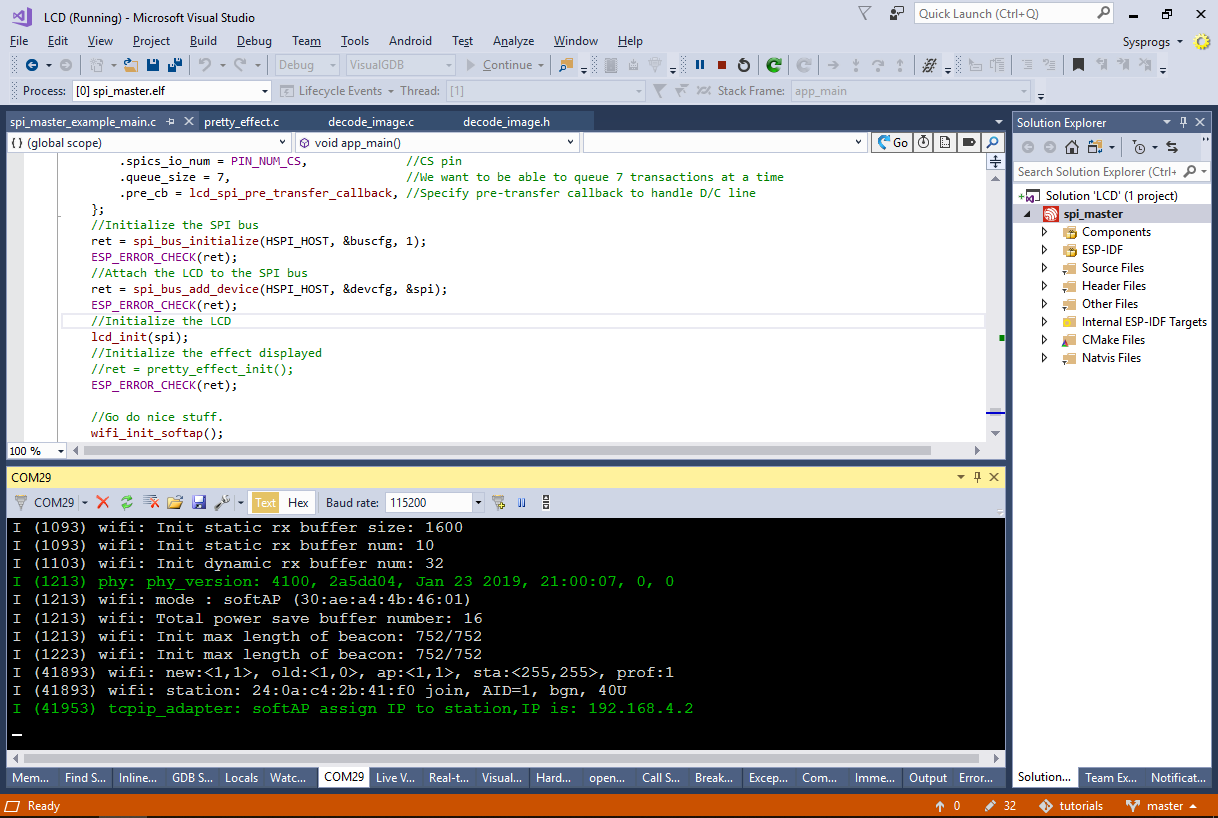 If the boards do not connect, ensure they both use the same Wi-Fi SSID and password and check that it doesn’t conflict with your main Wi-Fi connection.
If the boards do not connect, ensure they both use the same Wi-Fi SSID and password and check that it doesn’t conflict with your main Wi-Fi connection. - Once the boards connect, you the pictures taken by the camera will be shown on the LCD display of the WROVER module:
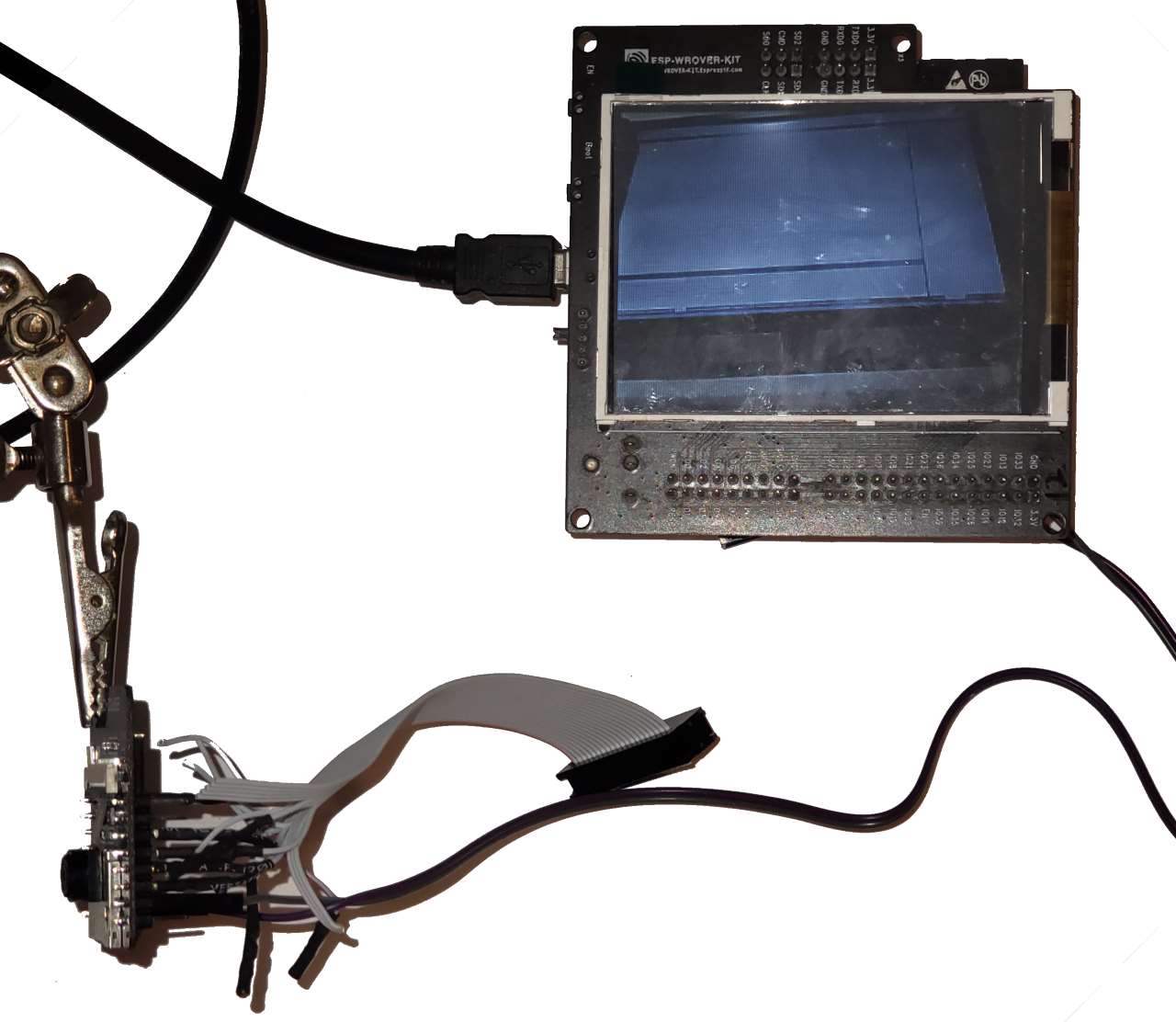
You can find the source code of the projects shown in this tutorial on our GitHub repository. If you would like both boards to connect to your regular Wi-Fi network instead, replace the call to the wifi_init_softap() function in the WROVER firmware by an equivalent of the wifi_init_sta() function from the ESP32-CAM firmware and update the WROVER firmware to fetch the images from a fixed IP address.